






NEW Original Matek CRSF to PWM Converter CRSF-PWM-6 / CRSF-PWM-C for TBS Crossfire Nano RX SE RC FPV Racing Drones Parts DIY
Quantity
-
Detail
Product Name NEW Original Matek CRSF to PWM Converter CRSF-PWM-6 / CRSF-PWM-C for TBS Crossfire Nano RX SE RC FPV Racing Drones Parts DIY Item NO. F45610-D1 F45610-D2 Weight 0.02 kg = 0.0441 lb = 0.7055 oz Category DIY RC Drone Accessories> Servo Creation Time 2021-11-12 NEW Original Matek CRSF to PWM Converter CRSF-PWM-6 / CRSF-PWM-C for TBS Crossfire Nano RX SE RC FPV Racing Drones Parts DIY
Parameters:
CRSF-PWM-6:
Compatible with CRSF protocol receiver only
6x PWM outputs
PWM frequency configurable (50Hz default, 100,160,330, 400Hz)
2x UARTs (for Receiver and GPS)
Telemetry ID: RxBt, Curr, Capa, Bat%, GPS, GSpd, Hdg, Alt, Sats
36V Max. battery voltage sense (1K:10K voltage divider built-in)
Compatible with external Current sensor (0~3.3V)
Vbat and Current sensor scale configurable
Failsafe value auto set
Firmware upgradeable
Rated voltage: 4~9V @5V pad, 0~36V @Vbat, 0~3.3V @Curr
No 5V regulator built-in
25mm x 16mm, 1.3g
Packing: 1x CRSF-PWM-6, Dupont 2.54 pins

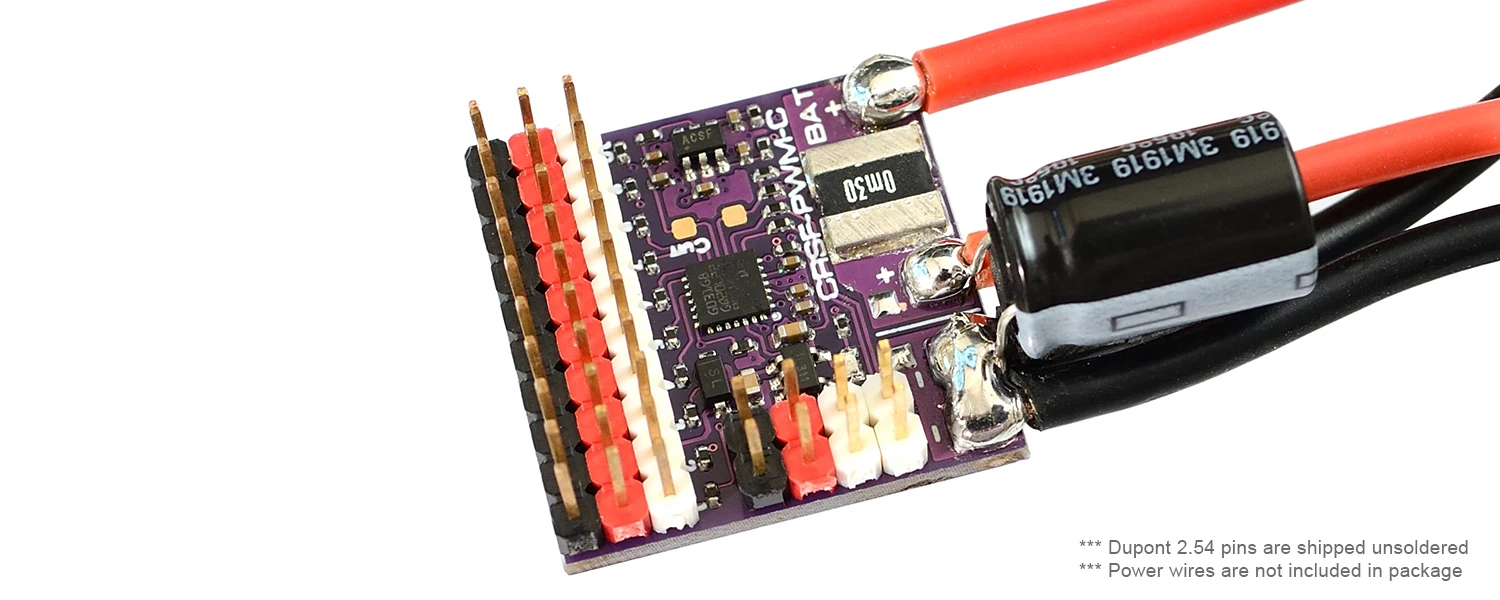
CRSF-PWM-C:
Compatible with CRSF protocol receiver only
10x PWM outputs
PWM frequency configurable (50Hz default, 100,160,330, 400Hz)
2x UARTs (for Receiver and GPS)
Telemetry ID: RxBt, Curr, Capa, Bat%, GPS, GSpd, Hdg, Alt, Sats
36V Max. battery voltage sense (1K:10K voltage divider built-in)
Current sensor built-in (90A continuous /220A Peak), current scale = 150 by default
Vbat and Current sensor scale configurable
Failsafe value auto set
Firmware upgradeable
Rated voltage: 4~9V @5V pad, 0~36V @BAT+
No 5V regulator built-in
26mm x 26mm, 2.8g
Packing: 1x CRSF-PWM-C, 1x low ESR capacitor, Dupont 2.54 pins


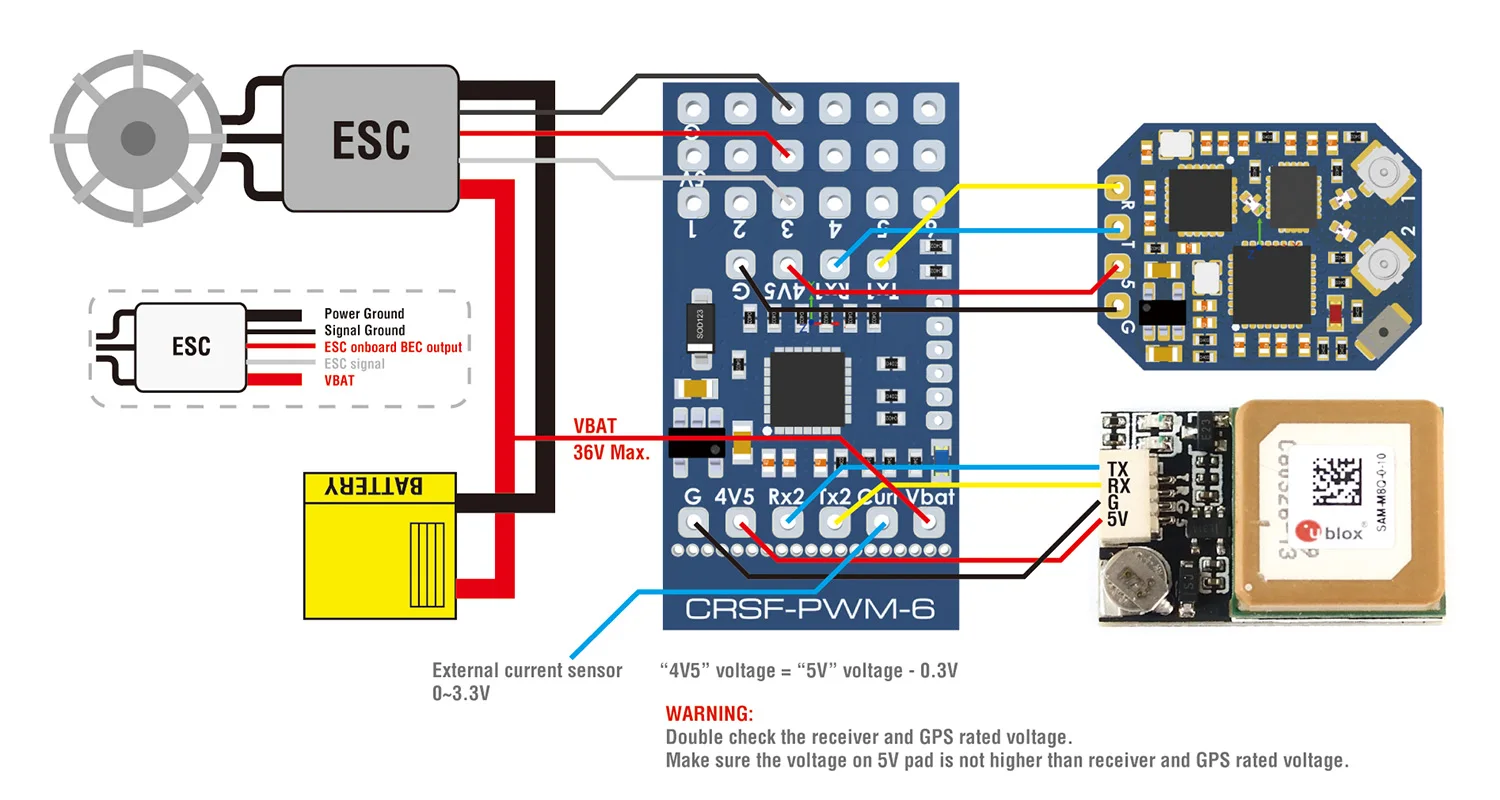
Pinouts and Pads:
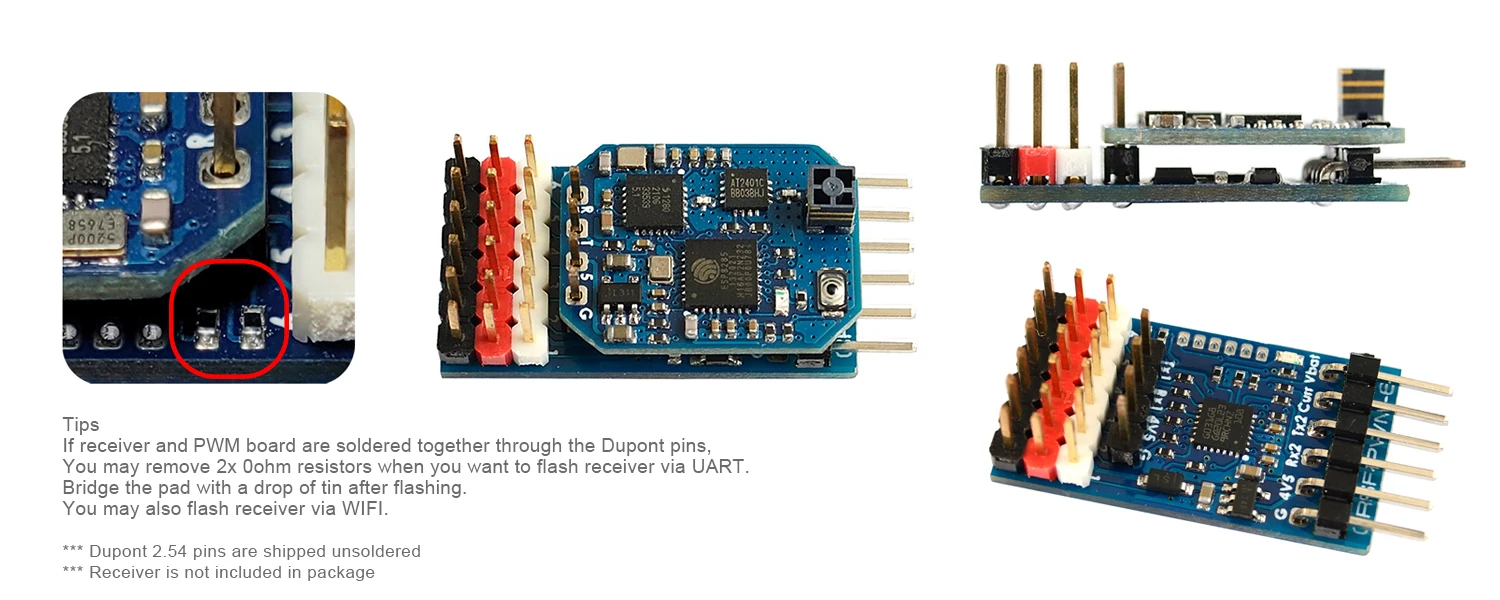
Tx1/Rx1(UART1) for CRSF protocol Receiver
Tx2/Rx2(UART2) for GPS/firmware update/setting parameters
1~10: CH1~CH10 PWM outputs
Curr: current sensor signal (0~3.3V)
Vbat: Battery voltage sensing (0~36V)
G: ground
4v5 pad voltage = 5V pad voltage -0.3V, make sure the voltage on 5V pad is not higher than receiver and GPS rated voltage.
Failsafe:
Failsafe value is set automatically after CRSF-PWM board is powered on and receive CRSF signal. LED blinks 8 times quickly.
Failsafe value = The PWM value of each channel(except CH3) when CRSF signal is received by CRSF-PWM board for the first time
CH3 is specially arranged for the throttle, Failsafe value = 988 by default.
Usually put the Throttle joystick to the lowest point, put AIL(Roll), ELE(Pitch), RUD(Yaw) middle before powering on receiver.
LED status:
slow blinks: CRSF-PWM board doesn't receive CRSF signal, e.g., receiver is not bound with transmitter, receiver is not connected to UART1 of CRSF-PWM board.
8x quick blinks: CRSF-PWM board received CRSF signal and failsafe value is saved.
solid ON: CRSF-PWM board and receiver are working normally
2x slow blinks between 8x fast blink and solid on: CLI mode is active
GPS telemetry:
Compatible with GPS NMEA protocol
GPS "TX" to CRSF-PWM board "RX" Single wire half duplex UART connection, CRSF-PWM board "TX" to GPS "RX" is not essential.
Support GPS Telemetry ID: GPS, GSpd, Hdg, Alt, Sats
u-blox series GPS can output "0+1 – UBX+NMEA" protocol by default
Sensors(GPS, GSpd, Hdg, Alt, Sats) will blink in Transmitter TELEMETRY tab once CRSF-PWM board has connection with GPS.
Troubleshooting for no GPS telemetry, double check the wiring between GPS and CRSF-PWM board, some u-blox GPS may don't output NMEA protcol, you need to be reverted GPS to default configuration in u-center.
TIM & PWM Frequency:
PWM frequency on all 10x Channels can be configured according to TIM
PWM run at 50Hz by default
TIM2: CH1, CH2, CH4
TIM16: CH3
TIM3: CH5, CH6, CH7, CH8
TIM1: CH9, CH10
CLI mode:
If CRSF-PWM board doesn't detect GPS connected to UART2 within 10 seconds after powering on, CLI mode will active.
After CLI mode is active, CRSF-PWM board can be connected to configurator via USB-TTL module/FC passthrough.
in CLI mode, CRSF-PWM board firmware can be updated
CLI mode has no effect to receiver CRSF signal and PWM outputs -
Customer ReviewsNo comments